
3D Printed VTOL Drone
Project Overview
This project’s goal was to design and build a field-ready, fixed-wing VTOL drone using rapid prototyping and US-sourced components. The primary objective was to produce an inexpensive, modular airframe capable of carrying a 1.5-pound payload with a 60-minute flight endurance.
My Role & Contributions
My responsibilities focused on the airframe design, material selection, and fabrication:
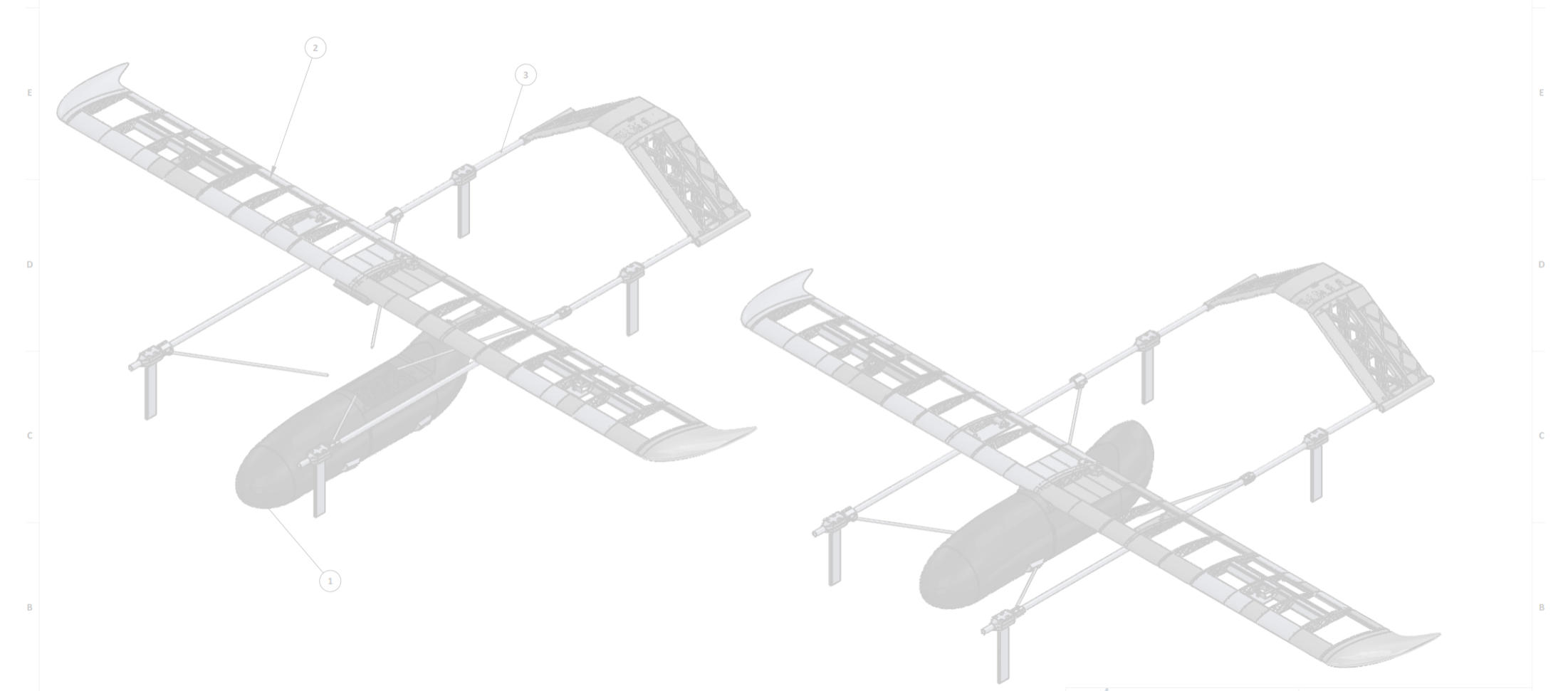
- CAD Modeling: I designed the modular, inverted V-tail assembly in SolidWorks to be lightweight and 3D-printable.
- Prototyping & Fabrication: I operated a Bambu Carbon X-1 printer to fabricate the wing and tail sections.
- Materials Research: I tested and validated properties of PLA Aero and Carbon-Infused PETG, analyzing their trade-offs between strength, weight, and printability. We ultimately selected the Carbon-Infused PETG for its superior stiffness, despite it being a difficult filament to print.
Key Objectives & Constraints
The airframe was designed to meet the following requirements:
- 15-pound gross takeoff weight (GTOW)
- 1.5-pound payload capability (to carry an AgEagle Altum-PT sensor)
- 60-minute target flight time
- 15-25 m/s cruise speed
- Standard avionics (Orange Cube, radios, etc.)
- Modular design for field packability, assembly, and repair
- US-sourced components for inexpensive manufacturing
Technical Design
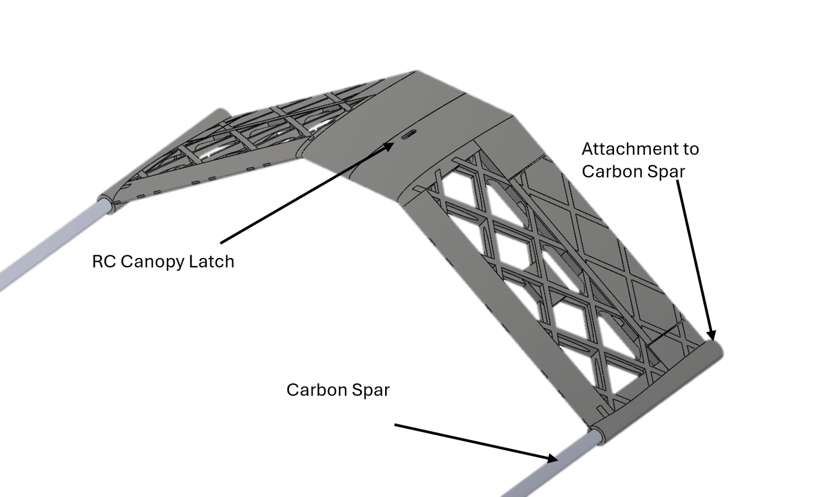
- Wing & Tail: 3D printed modular sections (Carbon Infused PETG) covered with an Oratex skin.
- Fuselage: 3D printed modular structure with a removable skin for avionics access.
Outcomes & Lessons Learned
The project successfully produced a modular, low-cost airframe that met the payload, avionics, and manufacturing requirements. The 60-minute flight time proved challenging, and the design process revealed several key lessons:
- Structural Considerations: The initial wing design required more reinforcement to handle torsional forces at the center, highlighting the structural demands of a high-aspect-ratio wing.
- Component Placement: The pusher motor’s placement had a major impact on the center of gravity (CG), requiring careful balancing with battery placement.
- Material Selection: While strong, Carbon-Infused PETG proved challenging for printing long, thin structures like wing spars, requiring specialized printer settings and support strategies.
Recommended Future Work
- Wing Strengthening: Integrate a larger, more robust spar or implement a composite skin to better manage torsional forces.
- CG Balancing: Move the pusher motor forward in the design to improve CG balance.
- Spar Sizing: Enlarge the spar used for the VTOL motor mounts to increase rigidity and reduce vibration.
